
Enquanto os robôs são assumindo parte das funções desempenhadas pelos operadores humanos, particularmente em missões perigosas, é evidente que irá ser utilizado em ambientes subterrâneos. No entanto, negou os atributos básicos necessários para o seu funcionamento - navegação, orientação e comunicações - robô mais militares ainda estão à espera de algumas soluções tecnológicas quando encarregado de missões no subsolo
MTGR visto em um túnel de reconhecimento mission.The robô utiliza iluminação on-board para iluminar a cena. Ele também pode usar uma câmera térmica para uma fiscalização mais secreta. O robô utiliza criptografado móvel rede ad hoc (MANET) rádio para comunicação. Para habilitar ligação estendida o robô pode implantar rádio 'pão' ao longo de seu caminho, para estabelecer ad-hoc continuidade da rede, permitindo que o robô para transferir vídeo em tempo real, voz e dados. Foto: Roboteam

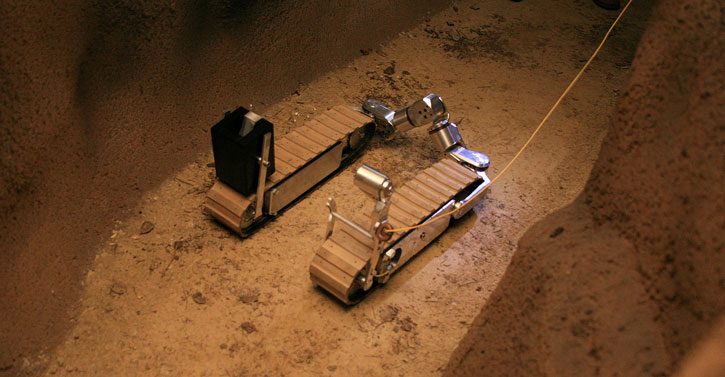
Micro Tactical Robot terra é reduzida por uma corda em uma caverna.Com um peso de 8,6 kg (£ 19), este robô ultra-móvel pode transportar 9 kg (20 libras) de carga útil, que incluem um aperto, câmera infravermelha ou outros sistemas. Foto: Roboteam
Robôs terra pode ajudar as atividades humanas no subsolo , por vezes até mesmo substituir operações tripuladas em determinadas aplicações. Missões assumidas pelo robô são muitas vezes mais seguro e, em algumas aplicações, mais rápido e mais preciso do que aqueles feitos por seres humanos. Como o ser humano, os robôs também têm limitações - particularmente na autonomia, compreensão situacional para a sua dependência em entradas do operador, o que requer comunicações confiáveis, seja diretamente ou através de entidades, constantemente ligam o operador subterrâneo para a superfície.
Ambiente subterrâneo - a perspectiva robô
Robôs terrestres contemporâneos são operado em modo de "controle remoto", exigindo boas habilidades do operador para mover o robô, compreender o seu entorno e manipular suas cargas. Alguns robôs já estão apoiando a operação semi-autônoma, permitindo que o veículo não tripulado de seguir conjuntos relativamente complexas de comandos com uma única instrução.
Capacidades semi-autônomas, como subir escadas, segurando um objeto ou rolar muitas vezes requer um amplo controle que vai exigir um combatente para se concentrar na operação do robô, em vez de sua própria sobrevivência, portanto, tornando o robô irrelevante sob o combate em terreno complexo. Operação de semi-autônoma é, portanto, obrigatório para fazer o robô de combate eficiente. A aplicação de operação semi autônoma é muitas vezes utilizam avançado, mas simples de operar interfaces homem-máquina e sistemas operacionais de robôs avançados.
Comunicações desafiador e controle também são comuns em operações em built-up e ambiente subterrâneo, negando GPS baseados localização de posição e comunicação. A integração GPS Diferencial (DGPS), interferometria de rádio-freqüência (DF), acústico (sonar) de processamento, medição e azimute e da distância de inércia poderia compensar um melhor posicionamento no GPS negados ambiente. Alguns desses sensores também poderiam permitir algum grau de operação semi-autônoma, e permitir a vários robôs para operar simultaneamente em um único controlador, permitindo a cobertura de área mais rápido, especialmente em ambientes fechados e em operações de reconhecimento subterrâneos.
Algumas das medidas utilizadas atualmente também pode fornecer soluções para os desafios operacionais subterrâneas. Para exemplos, túnel robôs scouting que muitas vezes são reduzidos para o túnel s através de poços de ventilação está usando uma corda - esta corrente também pode entregar o poder e link de comunicação de e para a plataforma, permitindo que o robô para implantar em sua missão ilimitada por on- alimentação da placa ou faixa de comunicações, oferecendo imagens e dados em tempo real para os operadores acima do solo.

A Caverna Crowler fromCMU foi desenvolvido como um projeto de pesquisa desenvolvido para subterrâneos atividades científicas, ajudam a explorar sítios arqueológicos e cavernas. Foto: CMU
De crawlers caverna para escuteiros túnel
No início de 2000 projetos de pesquisa, como a Gruta da Marmota e Crowler desenvolvido na Universidade Carnegie Mellon abriu o caminho para a exploração robótica e caverna subterrânea pesquisa arqueológica. Estes projectos mais tarde evoluiu para o Escoteiro Gêmeos - um robô de busca e salvamento desenvolvido no Sandia laboratórios. Gêmeos Escoteiro para ajudar nas operações de resgate em minas e túneis. Contudo, esta grande robô faltava o tamanho e agilidade para ser adequado para missões táticos.
Nos últimos anos, o Pentágono e, mais recentemente, a inter-agência de Combate à Organização de Apoio Técnico Terrorismo ( CTTSO ) que operam no âmbito do Departamento de Defesa dos EUA. Financiamento DOD dirigida a operações subterrâneos, mapeamento, consciência situacional, navegação, desvio de obstáculos, etc As Forças de Defesa de Israel (IDF) e do exército britânico também adquiriram um número substancial de MTGR s, para o uso como miniatura, soldado portátil UGV. Alguns desses robôs já entraram uso operacional e estão a tomar parte em operações de combate.

San Diego Task Force Tunnel está usando o MTGR robô para explorar túneis de contrabando que ligam a cidade mexicana de Tijuana com San Diego. Os MTGRs foram fornecidos através da inter-agência Combate à Organização de Apoio Técnico Terrorismo (CTTSO) forneceu 35 desses robôs para agências nacionais e locais de aplicação da lei para avaliação e uso operacional. Foto: Ron Rogers, ICE.
Micro Tactical Robot-do-chão
Um dos robôs considerados adequados para operação subterrânea é o Micro Tactical Robot Terra (MTGR), desenvolvido por Roboteam. Em 2013 CTTSO alocou $ 15600000 para avaliar e campo estes robôs até 2015. Cerca de 100 MTGR robôs já estão operacionais com equipes de combate do Exército Comando de Operações Especiais, Guerra Naval Comando Especial, bem interagências unidades táticas, como o Resgate FBI-Hostage Team, Border Patrol Grupo de Operações Especiais, onde participou recentemente na detecção de túneis ao longo da fronteira EUA-México, em Tijuana. CTTSO planeja oferecer 35 MTGRs a unidades táticas interagências ou operações domésticas. O Exército israelense e britânico têm seguido CTTSO recentemente, fielding o homem-portátil micro-robô MTGR. Entre as missões recentemente atribuídas ao MTGR são reconhecimento túnel subterrâneo, uma missão trazer a MTGR de pequenas dimensões e capacidades de rede exclusivos para suportar.
Além das forças especiais e outras unidades de infantaria em os EUA, militar israelense e britânica, a Alfândega da Califórnia e Patrulha de Fronteiras (CBP) força-tarefa túnel foi usando o MTGR na fronteira EUA-México têm expandido suas capacidades de vigilância com a introdução de robôs MTGR fornecidos por CTTSO. Os robôs já demonstrou o seu valor detectar túneis de contrabando ligando Tijuana e San Diego.
A Task Force túnel operando em San Diego, CA San Diego Task Force Tunnel, é apoiado por Homeland Investigações de segurança (HSI); Alfândega e Proteção de Fronteiras (CBP) - Patrulha de Fronteira; o Drug Enforcement Administration (DEA) e da Procuradoria dos EUA.

Agentes da Patrulha de Fronteira em Nogales, Az está usando o robô Pointman para limpar túnel que detectar, para fornecer uma avaliação preliminar das ameaças potenciais, pessoas potenciais com armas ou contrabando encontrados no túnel. O robô também pode ajudar a avaliar o clima do túnel é estruturalmente sólida, antes de agentes de risco de entrar no site.Foto: ARA
Pointman S UGV
Outro robô adaptados para vigilância do túnel é o Pointman Pequeno UGV (SUGV). De acordo com a ARA mais de 50 Robôs Táticos Pointman já são implantados com as equipes de polícia, golpe, governo e primeiro respondedor em todo os Estados Unidos. Este robô com rodas, construído pela ARA é atualmente tem sido usado recentemente na detecção túnel, operando em torno de Nogales, na fronteira com o Arizona.
O robô Contador túnel configurado para mover dentro de um túnel, usando 'modo de tanque' se movendo em duas faixas em paralelo. Ao negociar obstáculos o robô pode transformar a se mover em movimento estilo cobra. O robô é equipado com uma câmera estéreo e cargas 2D Lidar. Foto: Marinha dos EUA.
Reacção Rápida Detecção Tunnel (R2TD)
O projeto Contador Túnel Sistema perseguido e patrocinado pelo Gabinete do Secretário de Defesa (OSD) Joint-do-chão de Robótica (Enterprise JGRE), sob a Reacção Rápida Detecção Tunnel (R2TD) Capacidade tecnológica conjunta Demonstração (JCTD) foi lançado em 2011 e atingiu campo limitado Um sistema robótico de testes em 2013. protótipo para as operações de contra-túnel, o robô Contador Runnel é projetado para conduzir a exploração, mapeamento e caracterização de túneis com autonomia de alto nível, fornecendo uma solução segura e eficaz para a localização tridimensional (3D), mapeamento e caracterização de um ambiente do túnel.

O robô Contador Túnel testado sob o R2TD JCTD pode implantar em túneis de até 30 metros de profundidade por meio de furos tão estreita quanto 20 cm. Foto: Marinha dos EUA
Fonte: Defense Update
Segue o
link do Canal no YouTube e o Blog
Gostaria
de adicionar uma sugestão, colabore com o NÃO
QUESTIONE
Este Blog tem finalidade informativa. Sendo assim, em plena
vigência do Estado Democrático de Direito, exercita-se das prerrogativas
constantes dos incisos IV e IX, do artigo 5º, da Constituição Federal.
Relembrando os referidos textos constitucionais, verifica-se: “é livre
a manifestação do pensamento, sendo vedado o anonimato"
(inciso IV) e "é livre a expressão da atividade intelectual, artística,
científica e de comunicação, independentemente de censura ou licença"
(inciso IX). As imagens contidas nesse blog foram retiradas da Internet. Caso
os autores ou detentores dos direitos das mesmas se sintam lesados, favor
entrar em contato.
Nenhum comentário:
Postar um comentário